Project Overview
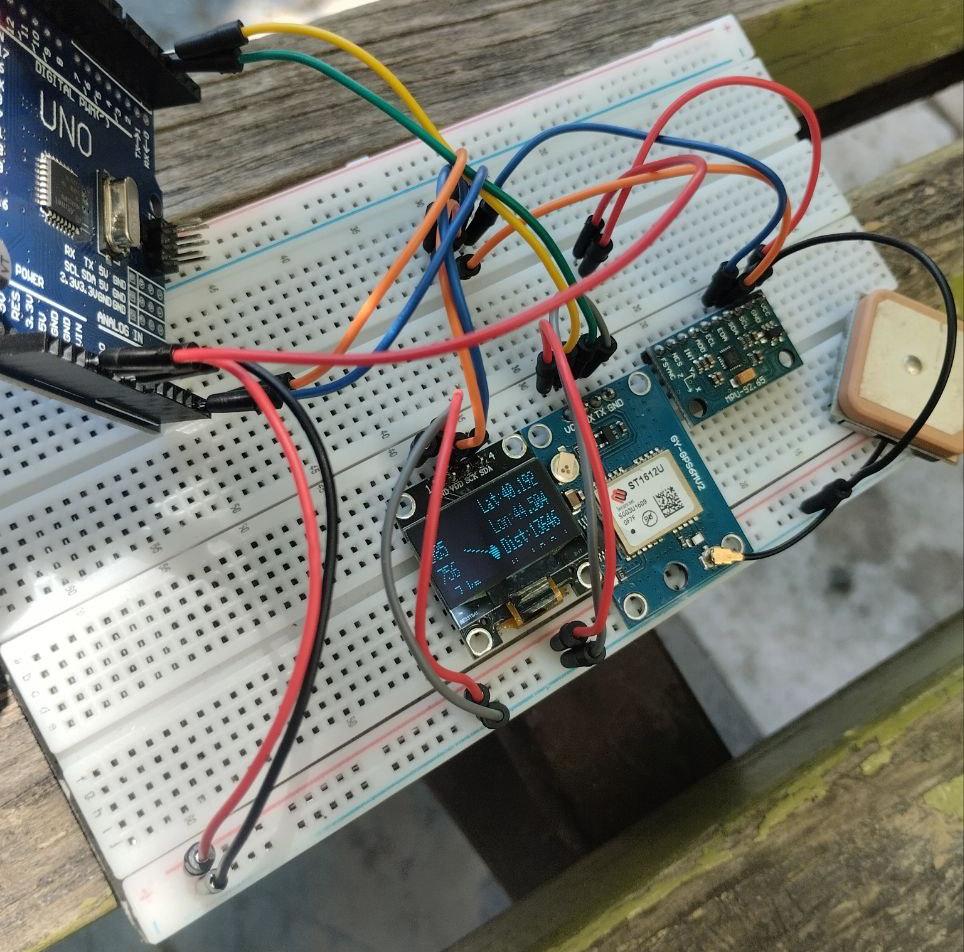
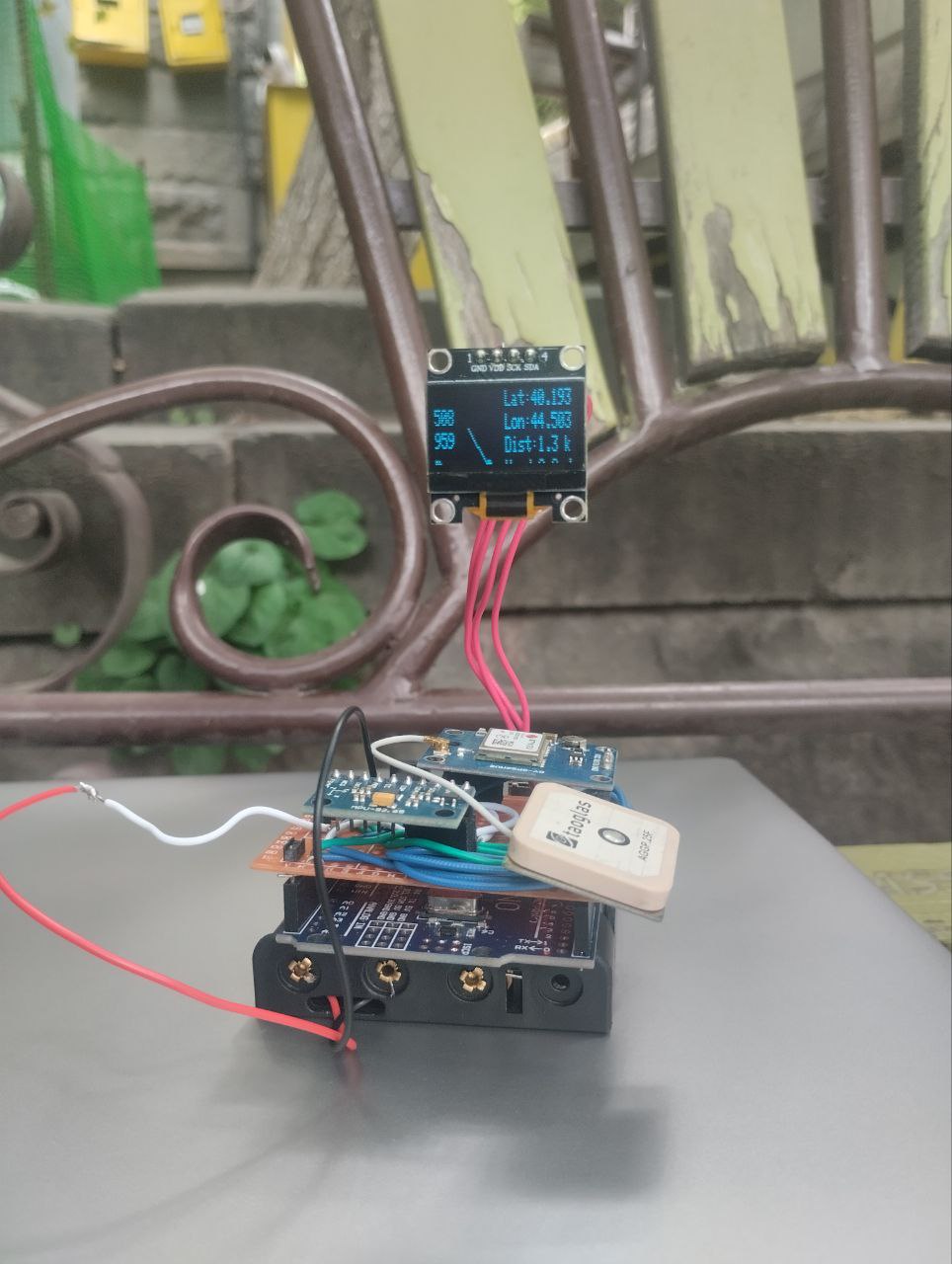
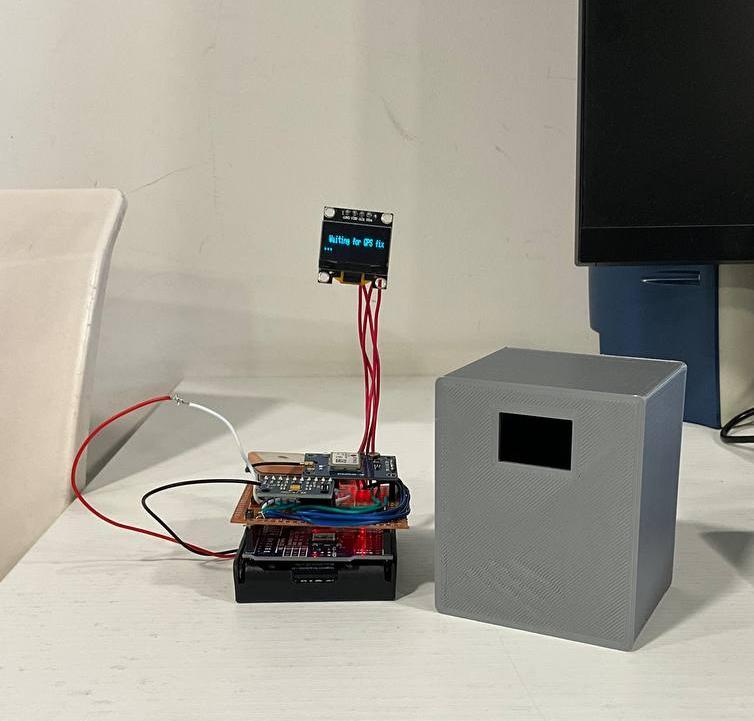
This project centers on building a GPS and compass navigation system using an Arduino Uno microcontroller, a GY-GPS6MV2 GPS receiver, a 128x64 OLED display, and an MPU9250 (specifically utilizing the magnetometer feature). The system is designed to retrieve real-time geolocation data and heading direction, then display this information visually on the OLED screen.
To understand the core principles of interfacing and working with the GPS module, the following guide was used:
How to Add GPS to an Arduino – Core Electronics
This resource provided foundational insights into GPS communication protocols (particularly NMEA sentences), parsing data using libraries, and general hardware integration considerations.